Latest News

Boeing's Starliner spacecraft is 'go' for May 6 astronaut launch
Boeing's Starliner capsule has been cleared for its first-ever crewed launch, a test flight scheduled to send two astronauts toward the International Space Station on May 6.
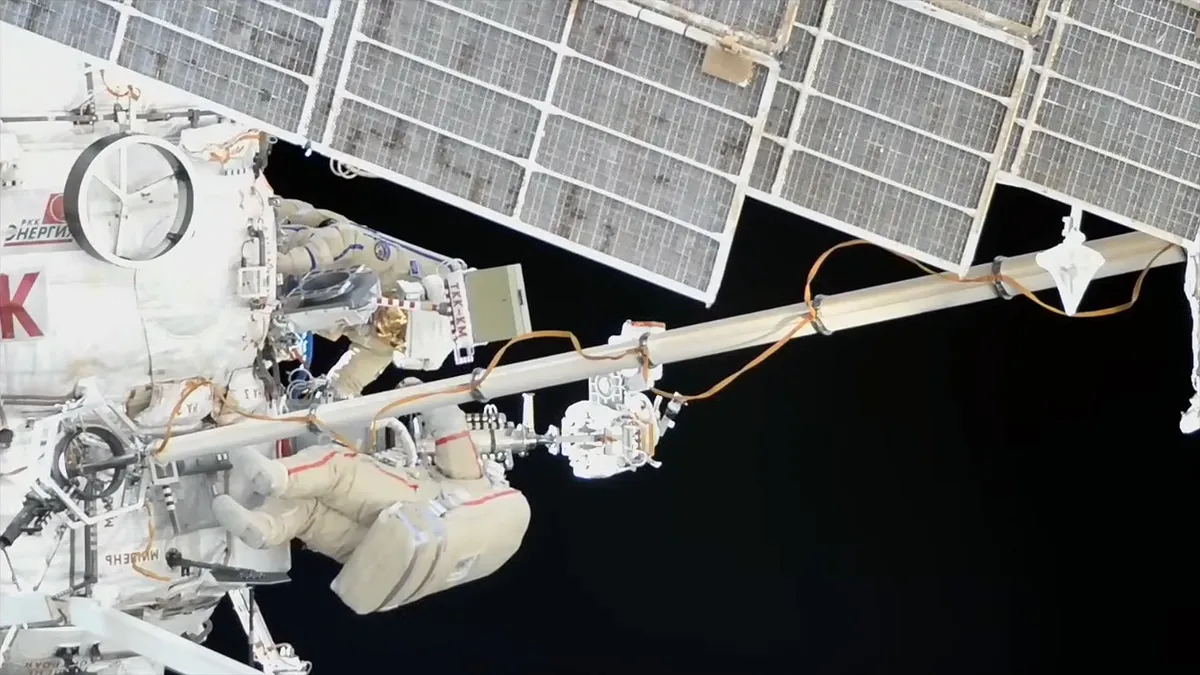
Russian cosmonauts make quick work of space station spacewalk
Oleg Kononenko and Nikolai Chub are back inside the International Space Station after just 4.5 hours outside.
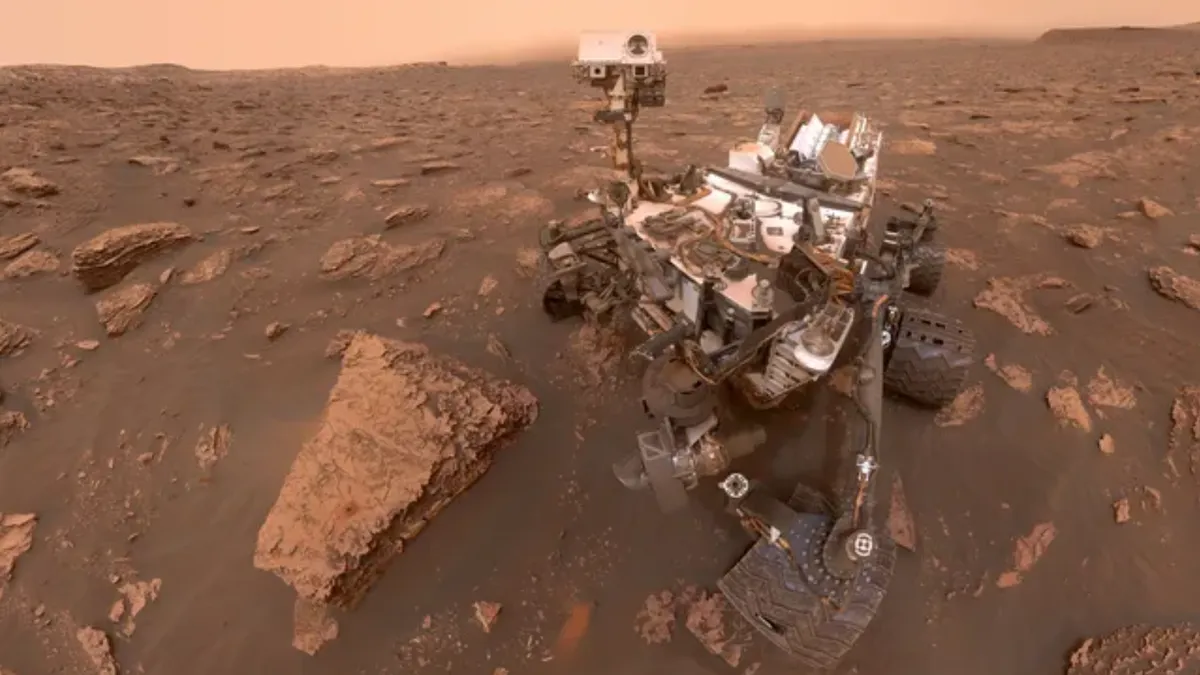
Curiosity rover may be 'burping' methane out of Mars' subsurface
A new theory suggests that NASA's Curiosity rover is "burping" the surface of the Red Planet, releasing methane trapped beneath a salty crust.

Boeing Starliner 1st astronaut flight: Live updates
Boeing will launch its first-ever Starliner astronaut mission for NASA as early as May 6, 2024

Lego reveals NASA Artemis rocket, Milky Way galaxy sets coming in May
Get ready space fans, Lego is about to launch two sets that can take you from the moon to edge of our cosmic neighborhood: Lego Icons NASA Artemis Space Launch System and Lego Art Milky Way Galaxy.

'I'm sure we'll find things out': NASA astronauts fly to launch site for 1st crewed Boeing Starliner mission to ISS on May 6 (photos)
Veteran NASA astronauts Butch Wilmore and Suni Williams expect to face the unexpected in space with Boeing Starliner, but told reporters on April 25 that the team is ready for the unexpected.
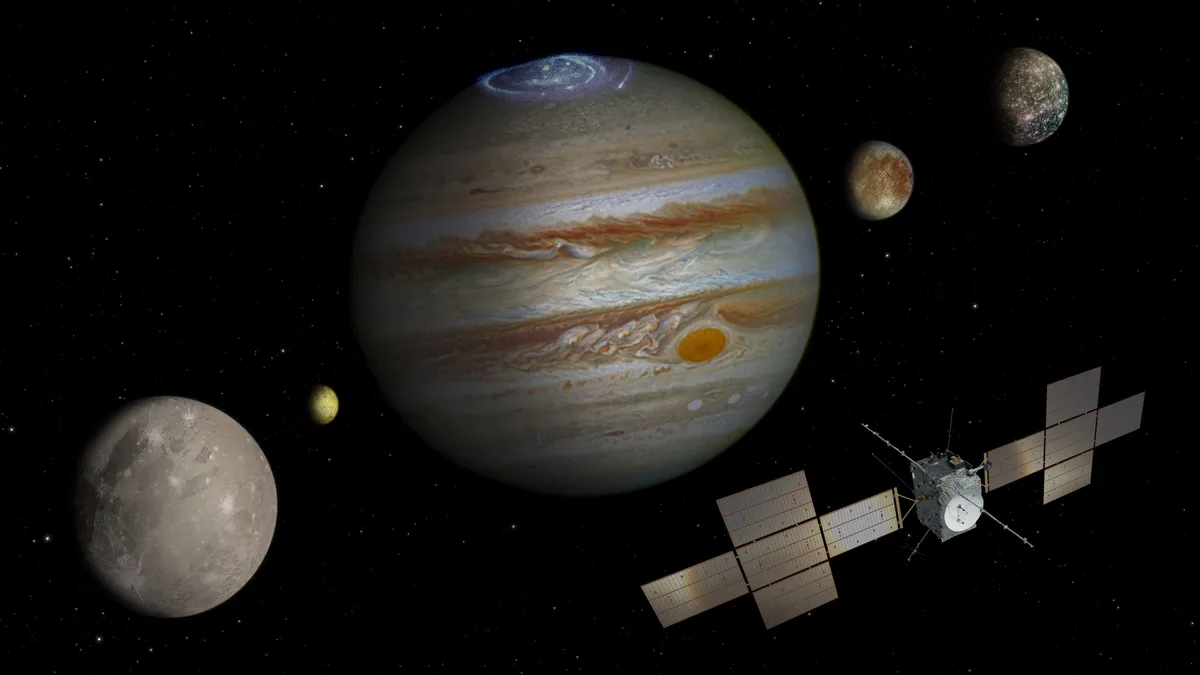
Ice-penetrating radar will help JUICE and other spacecraft find water beyond Earth
When it arrives at Jupiter and the planet's moons in 2031, the JUICE spacecraft will use ice-penetrating radar to see beneath determine habitability.

'Rocket cam' takes you aboard final launch of ULA's Delta IV Heavy (video)
After 64 years, the United Launch Alliance launched the final flight of its Delta IV Heavy rocket on April 9th, and stunning rocket cam footage captured the fiery finale.


